從模仿人類(lèi)骨骼的機(jī)械關(guān)節(jié),到能理解語(yǔ)意、辨識(shí)物體並自主決策的智慧體,人形機(jī)器人正處?kù)兑粓?chǎng)橫跨機(jī)械、電子、AI與人文的融合演進(jìn)中。這場(chǎng)技術(shù)進(jìn)化的歷程,不只是實(shí)現(xiàn)了人類(lèi)對(duì)「創(chuàng)造另一個(gè)自己」的夢(mèng)想,更正在改變我們與機(jī)器的互動(dòng)方式,乃至重新定義什麼是勞動(dòng)、什麼是智能。
人形機(jī)器人一直是科技世界中最具象徵性的存在。它們不僅代表人類(lèi)對(duì)自我形象的模仿與挑戰(zhàn),也承載著無(wú)數(shù)次科技與科幻交錯(cuò)的想像。近年來(lái),隨著全球人口老化、勞動(dòng)力短缺以及對(duì)智慧生活的高度追求,能夠模仿人類(lèi)行動(dòng)、具備語(yǔ)音與視覺(jué)交互能力的機(jī)器人,再次被推上浪頭。
這一波新興的人形機(jī)器人,不再只是能夠行走與揮手的展示品,而是能夠感知環(huán)境、理解語(yǔ)言、做出回應(yīng)的「準(zhǔn)智能體」。它們正在從模仿人類(lèi)的仿生設(shè)計(jì),快速跨越到具備感知、理解與決策能力的智慧機(jī)器人階段。這項(xiàng)跨越不僅依賴(lài)於硬體設(shè)計(jì)的精進(jìn),也仰賴(lài)AI、感測(cè)、邊緣運(yùn)算等多項(xiàng)關(guān)鍵技術(shù)的整合。

| 圖一 : 這一波人形機(jī)器人發(fā)展是能做出回應(yīng)的「準(zhǔn)智能體」。 |
|
仿生設(shè)計(jì)的啟蒙─從工藝模仿到機(jī)電整合
人形機(jī)器人的發(fā)展源自人類(lèi)對(duì)「創(chuàng)造與自己相像的存在」的執(zhí)念。早在15世紀(jì)達(dá)文西時(shí)代,便有關(guān)於機(jī)械人偶的設(shè)計(jì)雛形,而現(xiàn)代真正可運(yùn)作的機(jī)器人,始於20世紀(jì)的工業(yè)自動(dòng)化浪潮。
最初的人形機(jī)器人多以靜態(tài)的工藝構(gòu)造為主,模仿人的四肢比例、面部結(jié)構(gòu)或關(guān)節(jié)擺動(dòng)。隨著機(jī)電整合技術(shù)進(jìn)步,仿生設(shè)計(jì)進(jìn)入尺寸與機(jī)構(gòu)仿人化的新階段—關(guān)節(jié)配置模擬人體運(yùn)動(dòng)骨架,伺服馬達(dá)(如DC motor、BLDC與伺服驅(qū)動(dòng)器)控制手臂、膝關(guān)節(jié)等,使機(jī)器人不再只是「看起來(lái)像人」,更能「動(dòng)起來(lái)像人」。
穩(wěn)定控制是人形機(jī)器人跨出展示舞臺(tái)、邁向?qū)嶋H應(yīng)用的重要關(guān)鍵。以ZMP(零力矩點(diǎn))理論為基礎(chǔ)的步態(tài)控制技術(shù),讓雙足步行機(jī)器人能夠維持動(dòng)態(tài)平衡,即使在上下坡、階梯或不同地面材質(zhì)上行走,也能穩(wěn)健行進(jìn)。這一時(shí)期的代表性技術(shù)成果,包括Honda ASIMO與Boston Dynamics早期的人形平臺(tái),為日後的智慧發(fā)展奠定了機(jī)構(gòu)基礎(chǔ)。
智慧感知的落地──讓機(jī)器人能「看、聽(tīng)、感受」
模仿動(dòng)作的機(jī)器人,並不等於真正能與環(huán)境互動(dòng)的機(jī)器人。若要讓機(jī)器人真正走進(jìn)人類(lèi)世界,它們就必須具備「感知」的能力:看得見(jiàn)物件、聽(tīng)得懂語(yǔ)音、甚至能感受到接觸與動(dòng)態(tài)變化。
視覺(jué)感知是目前發(fā)展最成熟的技術(shù)之一。透過(guò)RGB攝影機(jī)、深度感測(cè)(如ToF與LiDAR)與SLAM(同步定位與建圖)演算法的整合,機(jī)器人可以辨認(rèn)物體形狀、距離、相對(duì)位置,進(jìn)而進(jìn)行避障、物件抓取與環(huán)境理解。例如Figure 01等新一代人形機(jī)器人,已可完成自動(dòng)導(dǎo)航與抓取任務(wù)。
語(yǔ)音與聲源定位則讓機(jī)器人與人類(lèi)之間的互動(dòng)變得自然。透過(guò)麥克風(fēng)陣列與語(yǔ)音辨識(shí)引擎(如ASR與自然語(yǔ)言處理),機(jī)器人能分辨指令來(lái)源、進(jìn)行語(yǔ)音回應(yīng),甚至識(shí)別特定語(yǔ)者進(jìn)行個(gè)人化互動(dòng)。
更進(jìn)一步的是觸覺(jué)與力感知技術(shù)的導(dǎo)入,模擬人類(lèi)皮膚感受外界壓力與接觸。透過(guò)壓力感測(cè)器、應(yīng)變計(jì)與力回饋模組,機(jī)器人能感知握力強(qiáng)度、接觸位置與受力方向,應(yīng)用於精細(xì)操作、協(xié)作裝配等場(chǎng)景。
最後,IMU(慣性測(cè)量單元)與角速度/加速度感測(cè),為機(jī)器人的姿態(tài)與移動(dòng)提供動(dòng)態(tài)監(jiān)控,協(xié)助平衡控制與環(huán)境變化因應(yīng),進(jìn)一步強(qiáng)化其自適應(yīng)能力。
邊緣智慧與決策──賦予機(jī)器人思考與互動(dòng)能力
若說(shuō)感測(cè)讓機(jī)器人擁有「感官」,那麼AI與運(yùn)算能力則賦予它們「大腦」。隨著邊緣運(yùn)算晶片與深度學(xué)習(xí)模型的導(dǎo)入,現(xiàn)代機(jī)器人已不再只是接收指令執(zhí)行,而是可以即時(shí)分析、判斷與回應(yīng)。
機(jī)器人的處理核心以MCU/MPU為基礎(chǔ),結(jié)合AI專(zhuān)用加速單元(NPU)如NXP的i.MX、NVIDIA的Jetson系列、Qualcomm Robotics平臺(tái),讓機(jī)器人可在裝置端即時(shí)完成影像辨識(shí)、語(yǔ)意分析與動(dòng)作決策,無(wú)需依賴(lài)雲(yún)端。
在演算法層,人臉辨識(shí)、物件追蹤、語(yǔ)意理解與情境推理演算法日趨成熟,讓機(jī)器人能理解複雜指令(如「請(qǐng)幫我拿紅色杯子」),並進(jìn)行邏輯判斷與場(chǎng)景推理。透過(guò)持續(xù)學(xué)習(xí),機(jī)器人還能優(yōu)化行為與交互方式,接近人類(lèi)的應(yīng)對(duì)模式。
在系統(tǒng)整合上,ROS(Robot Operating System)成為業(yè)界標(biāo)準(zhǔn)之一,結(jié)合感測(cè)、控制、視覺(jué)與動(dòng)作規(guī)劃模組,構(gòu)成完整的機(jī)器人作業(yè)系統(tǒng)。並藉由即時(shí)系統(tǒng)與容錯(cuò)設(shè)計(jì),保障系統(tǒng)穩(wěn)定與安全。
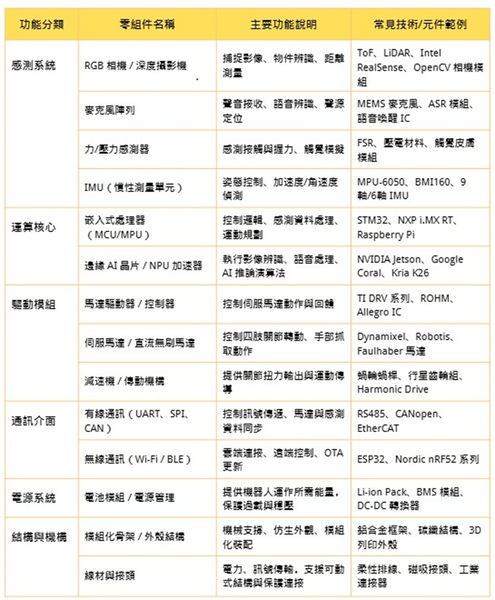
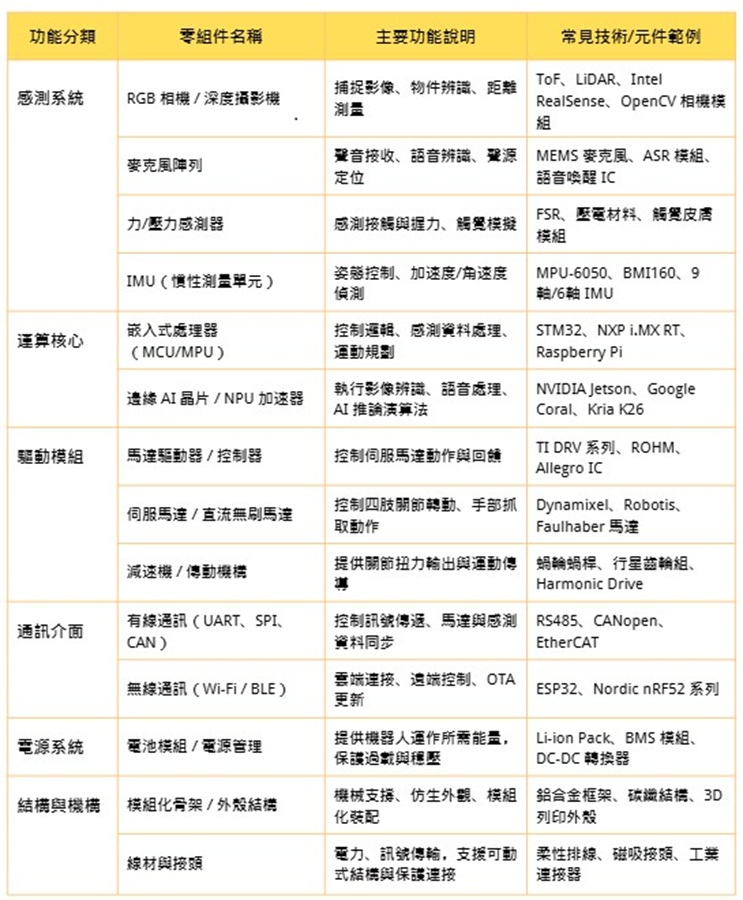
| 圖二 : 人形機(jī)器人關(guān)鍵零組件組成表。 |
|
從硬體到系統(tǒng)平臺(tái)──通用機(jī)器人的模組化革命
為了實(shí)現(xiàn)大規(guī)模應(yīng)用與任務(wù)多樣性,現(xiàn)代機(jī)器人設(shè)計(jì)趨向模組化與平臺(tái)化,這也推動(dòng)了通用型人形機(jī)器人的興起。
透過(guò)模組化關(guān)節(jié)與軀幹系統(tǒng),機(jī)器人不僅可快速組裝,更能根據(jù)任務(wù)需求進(jìn)行模組替換(如不同形態(tài)的手臂、腿部、頭部感測(cè)器),大幅提升彈性與成本效益。這類(lèi)設(shè)計(jì)也有助於量產(chǎn)與維護(hù),降低企業(yè)導(dǎo)入門(mén)檻。
另一方面,軟體平臺(tái)允許開(kāi)發(fā)者呼叫多種功能模組,從語(yǔ)音辨識(shí)、手部操作到自動(dòng)導(dǎo)航皆可模組化串接,開(kāi)啟「軟硬解耦」的應(yīng)用架構(gòu)。
目前市場(chǎng)上如Tesla的Optimus、Figure AI的Figure 01、Agility Robotics的Digit,皆採(cǎi)取此類(lèi)架構(gòu),讓同一機(jī)器人可用於製造、物流、零售等不同場(chǎng)景,真正實(shí)現(xiàn)「一機(jī)多用」的通用化目標(biāo)。
未來(lái)展望──從仿生機(jī)器人走向自主智慧體
站在技術(shù)的當(dāng)下回望,我們已走過(guò)了從仿生外觀設(shè)計(jì)、感測(cè)互動(dòng),到智慧決策運(yùn)算的完整路徑。下一階段,機(jī)器人將不只是模仿與回應(yīng),而將邁向自主學(xué)習(xí)、情感理解與社會(huì)互動(dòng)的新領(lǐng)域。
首先是自主學(xué)習(xí)與行為預(yù)測(cè):透過(guò)增強(qiáng)學(xué)習(xí)與模仿學(xué)習(xí)模型,機(jī)器人將能從環(huán)境中觀察與記憶,並自主優(yōu)化動(dòng)作流程與策略。這種能力將是未來(lái)無(wú)人作業(yè)、自主照護(hù)等應(yīng)用的關(guān)鍵。
其次是多模態(tài)交互融合:結(jié)合語(yǔ)音、表情、手勢(shì)等多重輸入與輸出形式,提升機(jī)器人在人機(jī)互動(dòng)中的情境理解力與表現(xiàn)力。例如,辨識(shí)用戶(hù)語(yǔ)氣、配合手勢(shì)指令、主動(dòng)提供協(xié)助等。
最後是能源效率與續(xù)航力的突破:面對(duì)長(zhǎng)時(shí)間工作的需求,如何提升電池容量、降低功耗、甚至導(dǎo)入能量回收技術(shù),將成為實(shí)用化的關(guān)鍵條件。
更重要的問(wèn)題是:當(dāng)人形機(jī)器人日益接近「類(lèi)人智慧體」的狀態(tài),社會(huì)是否已準(zhǔn)備好與他們共存? 他們是否有權(quán)利、責(zé)任?會(huì)否影響就業(yè)與人際關(guān)係?這些都將成為技術(shù)以外、社會(huì)必須面對(duì)的深層課題。
結(jié)語(yǔ)
從模仿人類(lèi)骨骼的機(jī)械關(guān)節(jié),到能理解語(yǔ)意、辨識(shí)物體並自主決策的智慧體,人形機(jī)器人正處?kù)兑粓?chǎng)橫跨機(jī)械、電子、AI與人文的融合演進(jìn)中。
這場(chǎng)技術(shù)進(jìn)化的歷程,不只是實(shí)現(xiàn)了人類(lèi)對(duì)「創(chuàng)造另一個(gè)自己」的夢(mèng)想,更正在改變我們與機(jī)器的互動(dòng)方式,乃至重新定義什麼是勞動(dòng)、什麼是智能。
未來(lái),隨著晶片、演算法與社會(huì)規(guī)範(fàn)的共同進(jìn)步,人形機(jī)器人勢(shì)必將從工業(yè)實(shí)驗(yàn)室邁向真實(shí)世界。唯有產(chǎn)業(yè)、學(xué)研與政策協(xié)同推進(jìn),才能讓這些「準(zhǔn)人類(lèi)」真正成為人類(lèi)社會(huì)的有益夥伴。
這篇文章只是開(kāi)端,後續(xù)我們將繼續(xù)探討人形機(jī)器人在實(shí)際產(chǎn)業(yè)應(yīng)用與社會(huì)共融面向的深層挑戰(zhàn)與機(jī)會(huì)。敬請(qǐng)期待。